|
I am an optimization research scientist at Gridmatic working on convex optimization for grid decarbonization. I did my PhD with Zac Manchester in The Robotics Institute at Carnegie Mellon University, and was a student researcher at [Google] Intrinsic with Stefan Schaal. I did my BS in Mechanical Engineering at Rice University, and my MS in Mechanical Engineering at Stanford University. I was the head TA for Optimal Control & Reinforcement Learning at CMU, where my materials and recorded lectures are available on the website. I have interned at SpaceX, Astranis, Lockheed Martin, and Maxar, primarily working on guidance, navigation, and control for spacecraft.Email / CV / Google Scholar / Twitter / Github |

|
|
I defended my PhD thesis, "Differentiable Convex Modeling for Robotic Planning and Control" in 2024. A big thank you to everybody who watched it live, as well as those that continue to watch it on YouTube! 
|
|
I'm interested in differentiable convex and non-convex optimization, motion planning, contact physics, and estimation. I like finding optimization-based solutions to new and old problems. |
|
Kevin Tracy, John Z. Zhang, Jon Arrizabalaga, Stefan Schaal, Yuval Tassa, Tom Erez, Zac Manchester ICRA, 2026 arXiv A unified framework for solving trajectory optimization problems in a derivative-free manner through the use of sampling and sequential convex programming. Instead of linearizing the cost and constraint functions with a first-order Taylor series, the optimizer is allowed to interpolate between sampled rollouts in each convex subproblem. |
|
Kevin Tracy, Zac Manchester in review code / arXiv A robust method for computing smooth derivatives through convex optimization problems solved with a primal-dual interior-point method. The associated Python [JAX] package is able to leverage these smooth derivatives to solve a variety of robotics-inspired problems. |
|
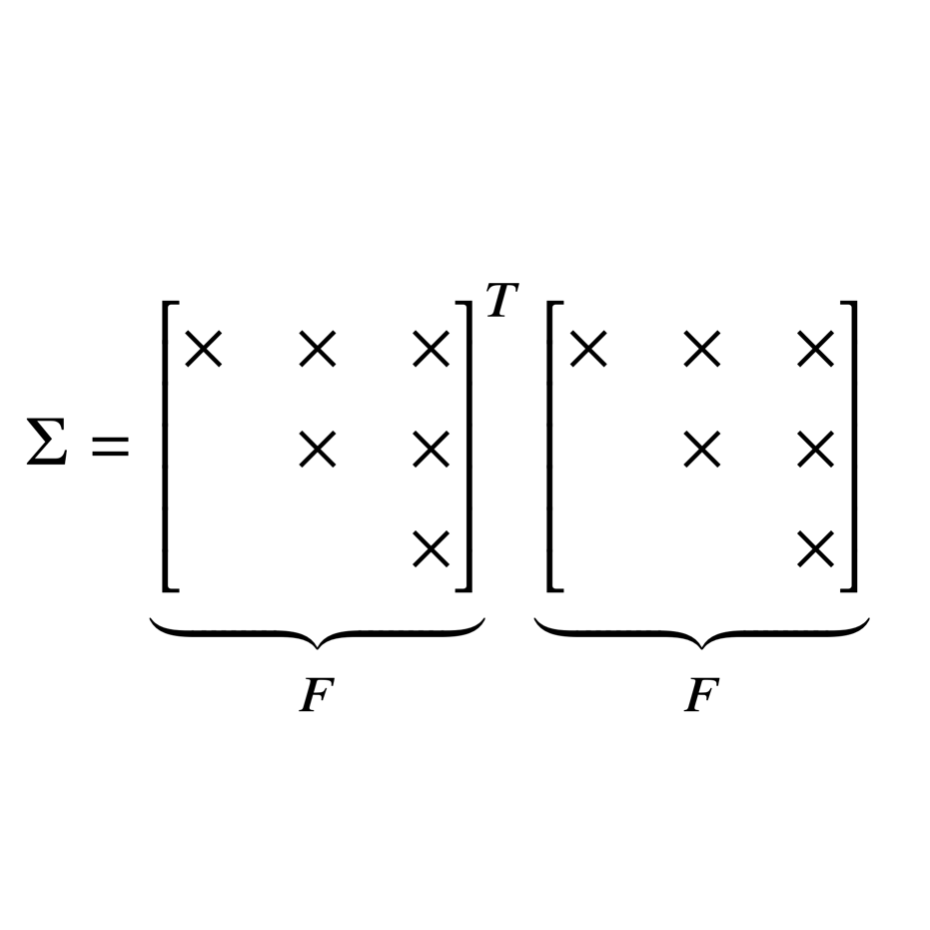
Kevin Tracy, Keegan Go, Ajinkya Jain, Stefan Schaal, Zac Manchester, in review website A unified and efficient framework for computing continuous collision detection information between convex sets in a way that allows for smooth differentiation of the collision information with respect to the pose and geometry of each set. |

|
Kevin Tracy, Zac Manchester, Ajinkya Jain, Keegan Go, Stefan Schaal, Tom Erez, Yuval Tassa ICRA, 2025 website / arXiv A method for learning contact force models from data in a way that scales very well on a GPU with a novel Linear Model Learning (LML) algorithm. |
|
Arun L. Bishop, John Z. Zhang, Swaminathan Gurumurthy, Kevin Tracy, Zac Manchester ICRA, 2024 arXiv / code An ADMM based QP solver that runs on a GPU and can handle very large MPC problems commonly found in robotics. |
|
Kevin Tracy, Taylor Howell, Zac Manchester IROS Workshop on Leveraging Models for Contact-Rich Manipulation, 2023 A quasi-dynamic rigid-body simulator for point clouds with tangential and torsional friction for each of the points. The result is stable and fast simulation with a QP solver. |
|
Kevin Tracy, Taylor Howell, Zac Manchester ICRA, 2023 arXiv / code / video A framework for computing differentiable collision information betweens a set of convex primitives by solving for the minimum scaling of each shape that results in an intersection. |
|
Kevin Tracy, Giusy Falcone, Zac Manchester AIAA SciTech Forum and Exposition, 2023 An updated version of the CPEG algorithm that allows for free-final time trajectories combined with an atmospheric density estimation scheme. |
|
Dynamic Mode Decomposition Brian Jackson, Jeong Hun Lee, Kevin Tracy, Zac Manchester CoRL, 2022 OpenReview / arXiv / code An improved version of dynamic mode decomposition that includes jacobian regularization from an a priori. dynamics model for learned dynamics in optimal control. |
|
Kevin Tracy arXiv / code The classic square-root Kalman Filter significantly simplified through the use of QR decompositions. |
|
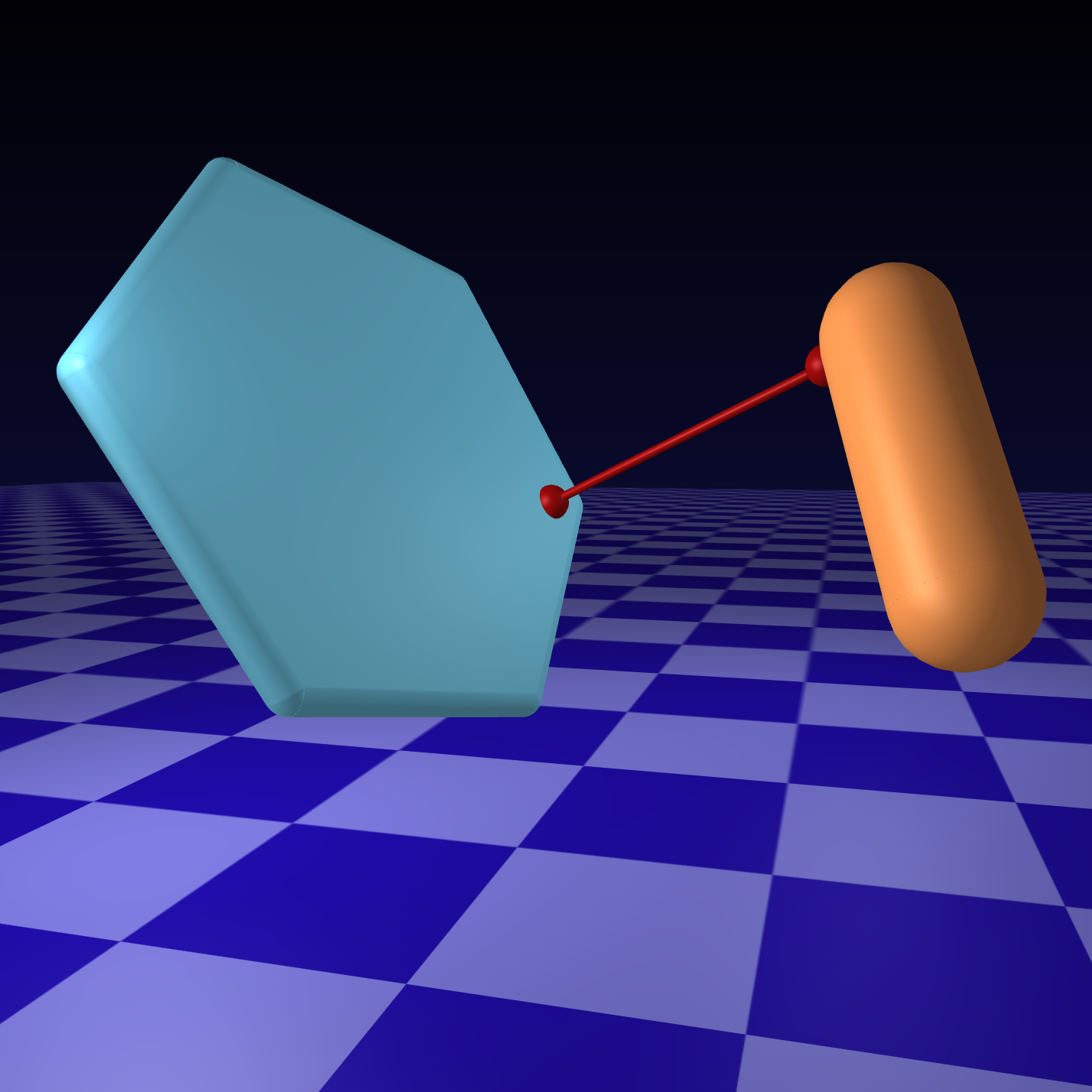
Kevin Tracy, Taylor Howell, Zac Manchester arXiv / code DiffPills computes collision information between capsules and padded polygons by forming and solving differentiable quadratic programs. |
|
Taylor Howell, Kevin Tracy, Simon Le Cleac'h, Zac Manchester ISRR, 2022 arXiv / code CALIPSO is a nonlinear programming solver designed to handle the types of conic and complimentarity problems that arise in robotic motion planning problems with contact. |

|
Max Holliday, Kevin Tracy, Zac Manchester, Anh Nguyen 4S Symposium Small Satellites Systems, 2022 V-R3x is a three cubesat constellation that demonstrated on-orbit mesh networking and relative navigation. |

|
Kevin Tracy, Zac Manchester Ewan Douglas, IEEE Aerospace Conf., 2022, Best Paper (Avionics and Electronics for Space Applications) A control and estimation framework is proposed for a fine pointing cubesat where traditional reaction wheels are swapped for three actuated booms with tip-mounted masses. |
|
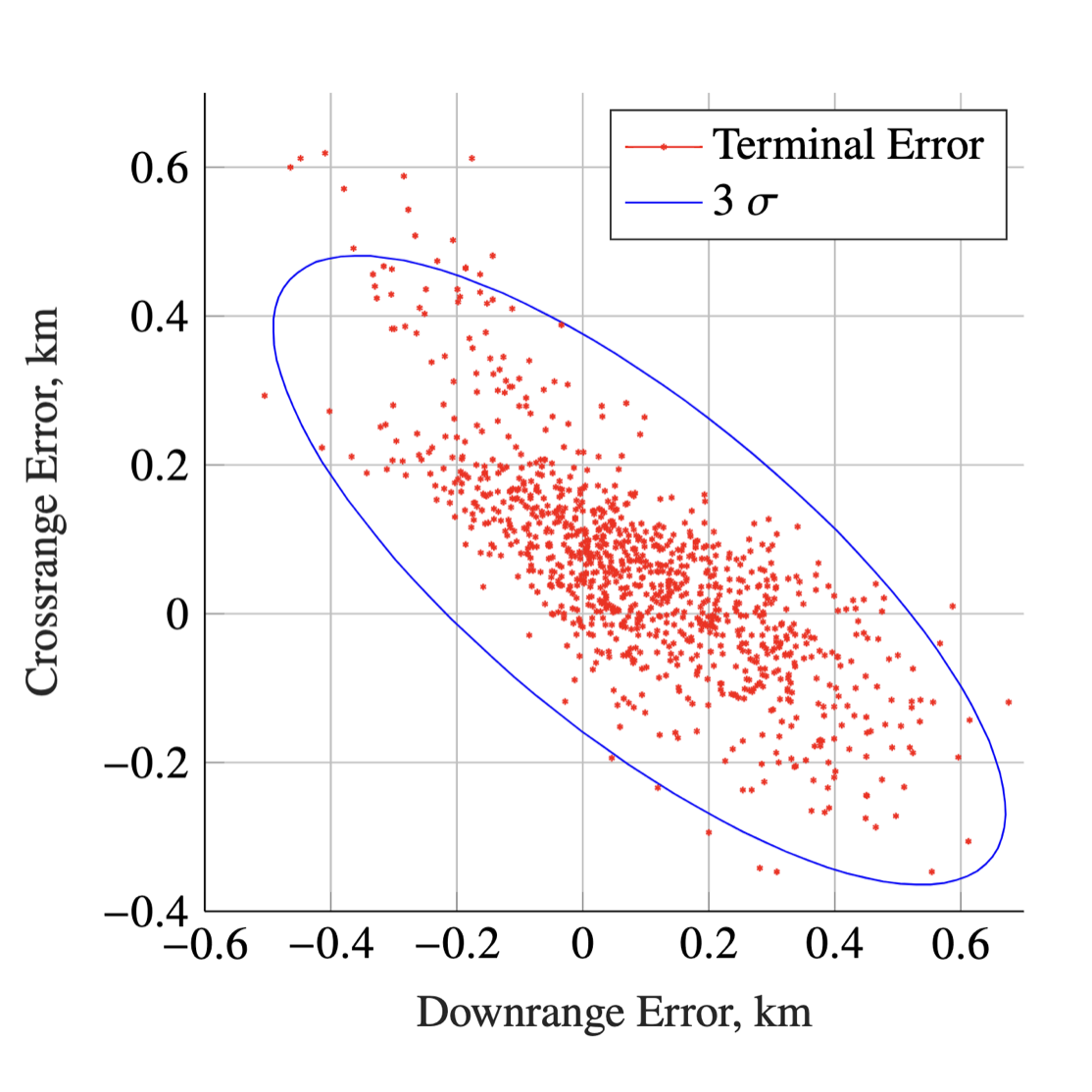
Kevin Tracy, Zac Manchester IEEE Aerospace Conf., 2022 pdf / code CPEG is an online-capable tool for optimal entry guidance in the Martian atmosphere. |
|
Ewan Douglas, Kevin Tracy, Zac Manchester Frontiers in Astronomy and Space Sciences, Volume 8, 2021 pdf / arXiv The environmental disturbances on a nanosatellite are analyzed within a novel control framework to establish practical performance limits. |

|
Kevin Tracy, Zac Manchester AAS/AIAA Space Flight Mechanics Meeting, 2021 pdf / code A trajectory optimization solver based on differential dynamic programming with an augmented lagrangian to handle conic constraints. |
|
Brian Jackson, Kevin Tracy, Zac Manchester IEEE RA-L, 2021, Nominated for Best Student Paper A unified approach to quaternion differential calculus for use in optimization. |
|
Brian Jackson, Tarun Punnose, Daniel Neamati, Kevin Tracy, Rianna Jitosho, Zac Manchester ICRA, 2021 pdf / code A trajectory optimization solver based on differential dynamic programming with an augmented lagrangian to handle conic constraints. |
|
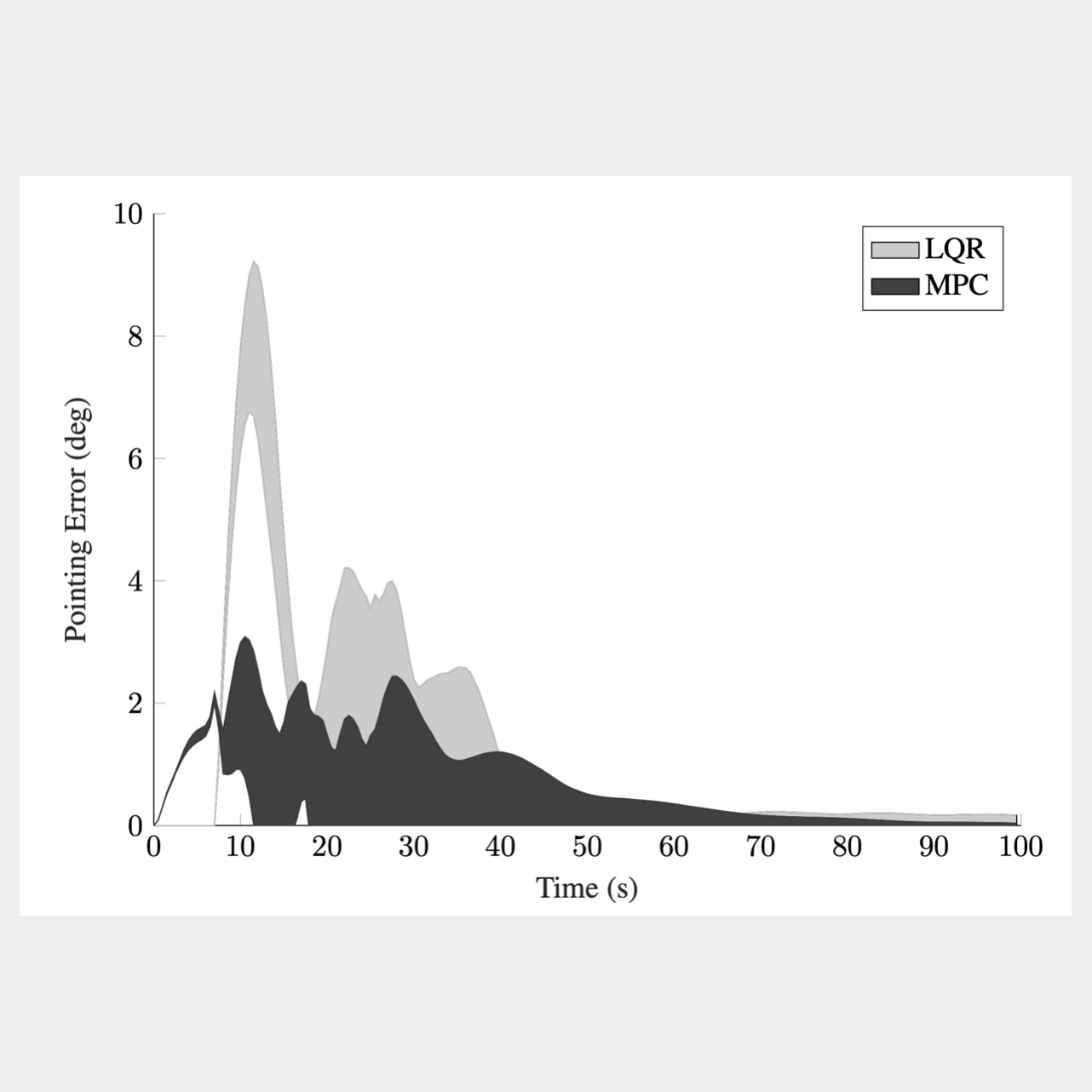
Kevin Tracy, Zac Manchester AAS/AIAA Astrodynamics Specialist Conference, 2020 pdf / code Convex model-predictive control is used to stabilize a flexible spacecraft during planned thruster firings. |